

技术
|
08 Jan 2022
如何构建蓝牙寻向功能的演示
利用蓝牙 AoA 技术实时跟踪移动标签。
")
作为蓝牙 5.1 的一部分发布的蓝牙寻向功能可能正是为整个室内环境带来高精度定位的技术。顾名思义,蓝牙寻向功能可以检测到带有标签的人或物相对于一个或多个(通常是固定的)锚点的方向。与原有解决方案相比,蓝牙寻向功能的输出实现了巨大改进,原有解决方案使用接收信号强度指示器 (RSSI) 来粗略估计标签和锚点之间的距离,而不提供任何关于标签相对方向的信息。
蓝牙寻向功能使用到达角 (AoA) 技术来计算移动标签发射的射频信号到达锚点的角度。该功能通过测量锚点多天线阵列中传入蓝牙广播消息的细微相位差来实现这一点。我们在瑞典马尔默的办事处中测试了这项技术,使用连接到天线阵列的蓝牙 5.1 模块作为固定锚点,同时使用了带有另一个蓝牙 5.1 模块的移动标签。
请观看此视频以了解其表现:

演示详解
如您在视频中所见,在整个演示过程中,当背景中的人员携带着移动标签走动时,位于前方的伺服系统会密切跟踪该标签。该标签由 u-blox 应用板组成,包含一个基于 Nordic nRF52833 芯片组的 u-blox NINA-B406 蓝牙 5.1 低功耗模块。在此特定环境中,该标签以大约 10 米的范围广播蓝牙消息,但在其他用例中可以进一步扩展。
带有消息的射频信号由带有 NINA-B411 蓝牙低功耗模块的 u-blox 天线板接收,该模块载有 u-blox 寻向功能软件。该天线板包括五个交叉极化天线贴片,用于确定输入信号相对于水平和垂直平面的角度,此外还带有由 LED 组成的十字形记号,用于实时显示角度估算值。
最后,天线板输出包含估算角度、接收信号强度指示器 (RSSI) 值、标签 ID 以及其他值的数据流。然后,角度估算值就被用于控制安装在可旋转支架上的伺服系统,因此该系统不断地实时指向移动标签。
加快蓝牙寻向解决方案的开发
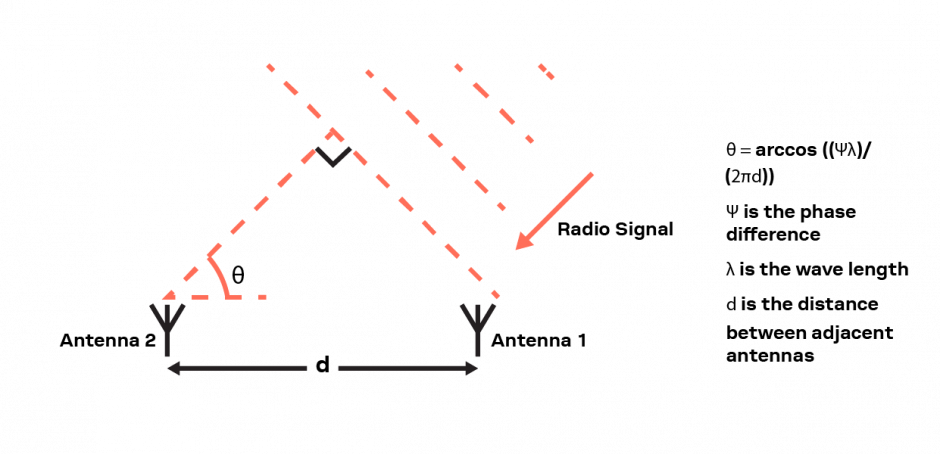
下图说明了天线阵列如何使用基于到达角 (AoA) 的寻向功能来确定传入射频信号的方向。移动标签发射的信号到达每个单独的天线,这些天线构成锚点的多天线阵列,并且相对于其他天线会存在轻微的相移。对射频信号的传播方式进行一些假设后,我们利用在每个天线上观察到的微小相位差即可计算其到达角:
对于没有用于受限嵌入式系统的时间关键型固件的开发经验的开发人员而言,实施将相位差转换为输出角度所需的算法,可能会给其带来困难。为了简化寻向解决方案的开发并加快上市时间,我们开发了一款无线互联软件。该软件为开发人员提供了一个易于使用的命令 API。因此,开发人员无需编程即可计算 u-blox NINA-B411 模块上的正确角度,处理射频数据收集和预处理,并抑制每个单独天线上的多径分量。
AoA 寻向功能的无数用例
当我们开始研究蓝牙寻向功能时,我们基本上将其视为朝着高精度室内定位迈出的一小步。但随着研究的继续,我们意识到有无数种方法可以使用寻向技术本身。该技术可用于构建跟踪带标签的目标的摄像机,只需将摄像机安装到本文演示中使用的伺服系统上即可。该技术能够确定标签位于锚点的哪一侧,因而可用于确定资产的位置,因此该技术可用于开发住宅、商业和工业建筑的门禁控制系统。安装在车辆上时,该技术可用于实施碰撞规避系统。此类示例还有很多...
联系我们
Erik Carlberg
u-blox 短程通信产品中心高级产品经理
特色产品







