

Technology
|
24 Nov 2022
搭载实时动态载波相位差分技术(RTK)
许多应用都需要具备高于 GNSS/GPS 本身准确性的定位功能, 而支持厘米级定位精度的 RTK 技术恰好符合需求。
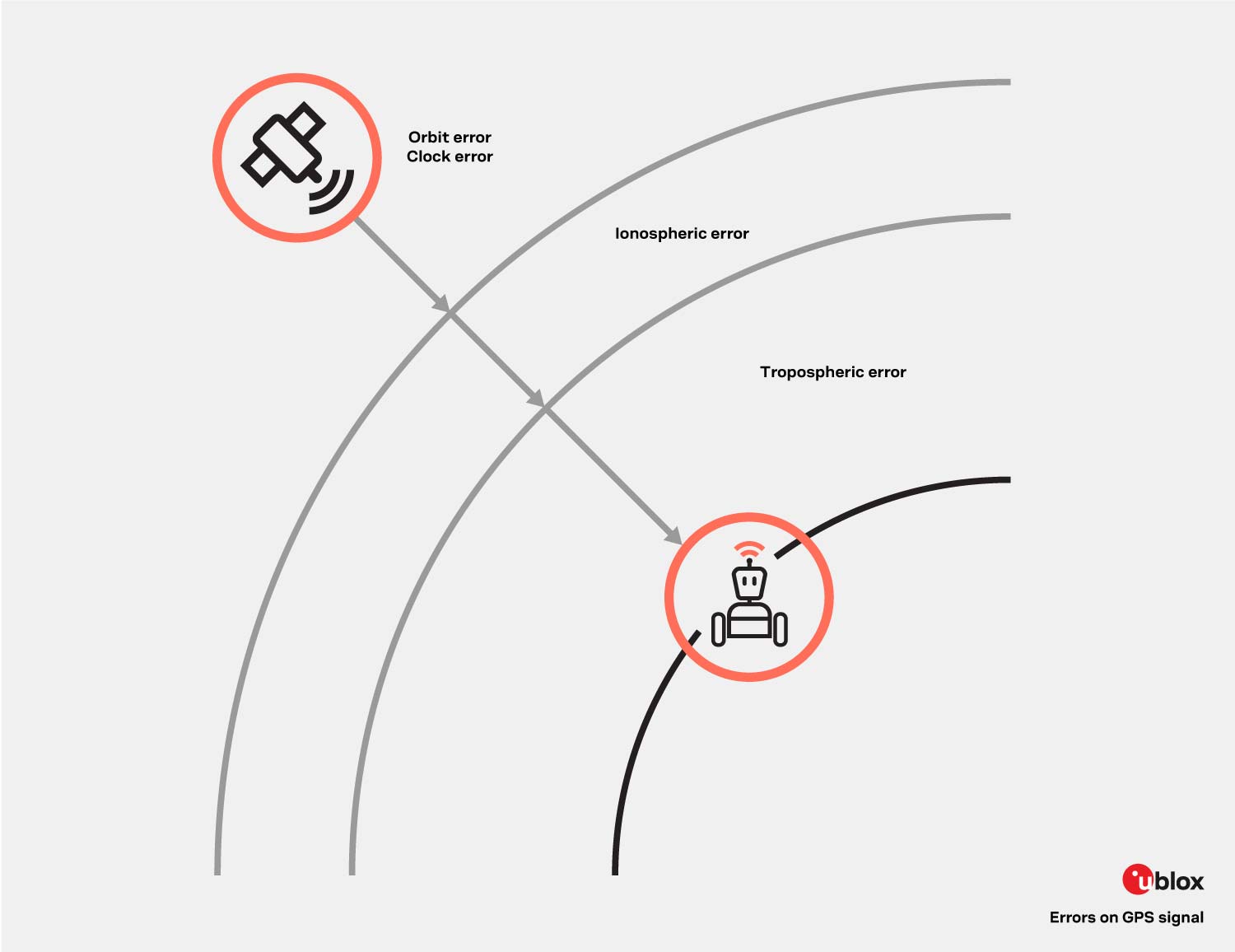
GNSS 定位解决方案的原理无非是通过计算接收机与 GNSS 卫星之间的距离来确定位置。 通过将光信号到达 GNSS 接收机所需的时间乘以光速,即可计算出这个距离。 尽管这种计算方法非常简单,但信号传播时间受到多种误差源的影响,包括卫星轨道和卫星钟差,以及电离层和对流层影响。 所有这些错误源都会导致定位不准确。
什么是 RTK?
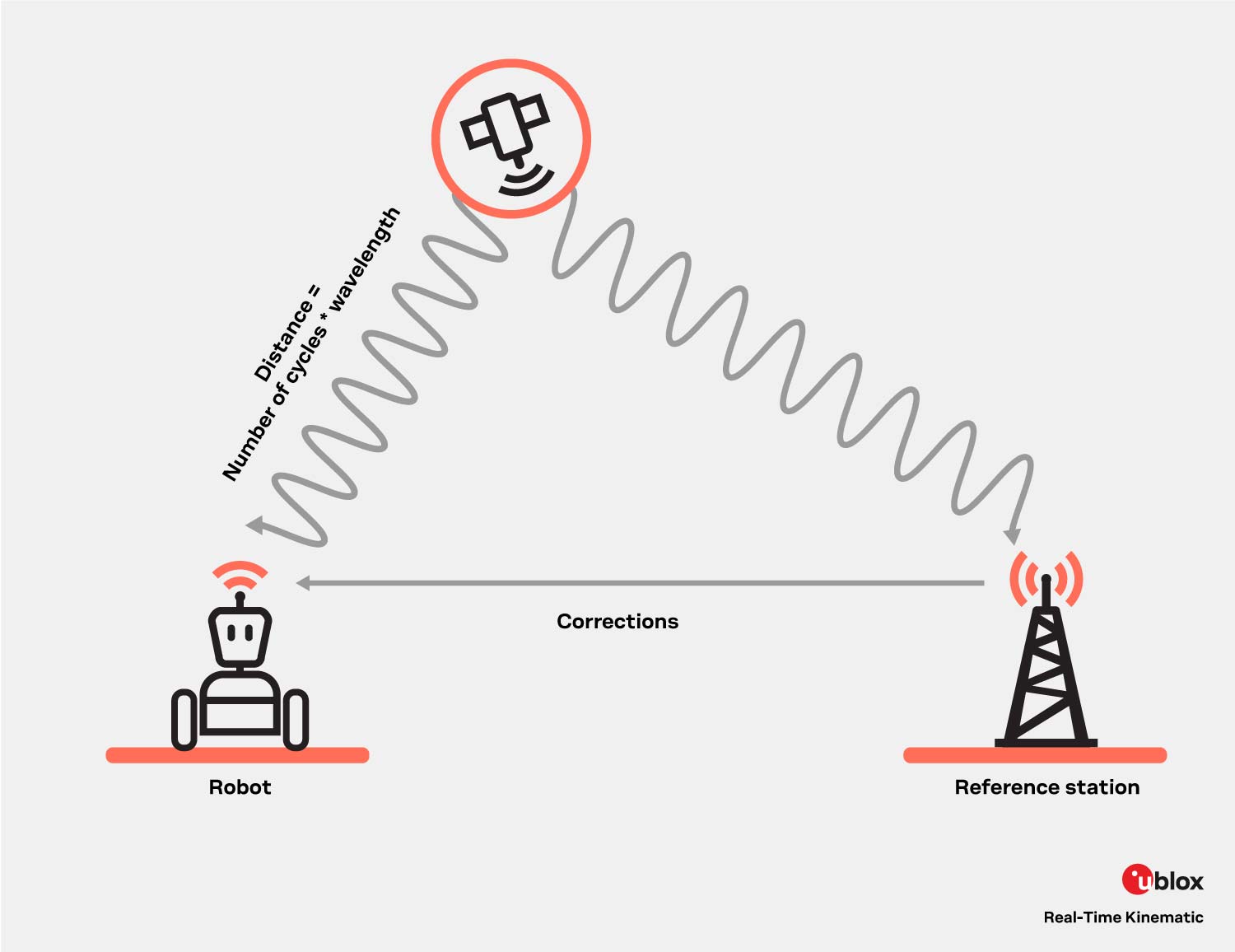
虽然同样需要通过测量与卫星之间的距离来实现定位,但 RTK 和传统 GNSS 定位的方法却有所不同:RTK 采用基于载波的测距方法,而 GNSS 定位则采用基于��代码的测距方法。 前一种方法考虑了卫星与 GNSS 接收机之间的波长数,由于波长幅度差异显著,这种方法可提供更高的精度:L1 信号波长为 19cm,而伪随机噪声码的频率对应的波长则为 300m 左右。 由于载波信号不包含时间戳等信息,计算波长数极为复杂。 将未知载波周期模糊度解析为整数数值的过程对于 RTK 和厘米级精度非常关键。
进行整周模糊度解算 (IAR) 之前,必须先校正信号误差。 校正数据通过附近已知位置的本地参考站或者网络 RTK 设置中的参考站传送给用户接收机。
单个参考站 RTK
就RTK 解决方案而言,最简单的形式是采用邻近用户接收机的单个参考站。 参考站处于勘测位置,因此可以估算出接收每个 GNSS 信号的误差。将误差校正传输给用户接收机后,将会进行 IAR 计算。 如果用户与参考站之间的距离较近,则比较适合使用此原理。 如果用户与参考站之间的距离较远,两个位置的大气条件可能有所差异。 这就可能导致无法成功进行 IAR 操作。 最大距离的典型指导值为 25km。
网络 RTK (NRTK)
在这种情况下,RTK 解决方案可以使用参考站网络,以便用户接收机按照上述同一原理连接至其中的任何参考站。 使用参考站网络时,RTK 解决方案的覆盖区域将会大幅增加,而不会影响测量精度。
使用多个参考站时,可以更精确地建模与距离相关的误差。 采用这种建模方法时,与最近天线的距离的相关性将显著降低。 在这种设置中,服务会创建邻近用户的假设虚拟参考站(VRS),可用于建模用户接收机位置的误差。 一般而言,这种方法可优化整个服务区域内的校正结果,从而降低网络参考站的密度。 由于降低了对单个参考站的依赖性,还可以提高测量可靠性。
大多数国家和地区拥有大量的增强服务提供商,包括私企和政府机构。 通常借助海事无线电技术委员会(RTCM)协议来传达校正数据。
更多高级解决方案
随着可扩展解决方案方面的需求增加,精密单点定位(PPP)、精密单点定位技术与实时动态定位技术(PPP-RTK) 和 3GPP LTE 定位协议(LPP)SSR 等技术应运而生。 基于状态空间表示 (SSR) 的技术可通播广阔地理区域内一直有效的所有 GNSS 误差模型。 由于只需要单向通信(基于 IP 或通过卫星 L-band),可以向任意数量的用户交付服务。
其他产品










